

This example applies PRISM to the specification and analysis of a Markov decision process (MDP) model.
The dining philosophers problem is an example of a large class of concurrency problems that attempt to deal with allocating a set number of resources among several processes. The problem originates with Edsger Dijkstra, who in 1971 set an examination question where five computers competed for access to five shared tape drives. The problem was then retold by Tony Hoare as the dining philosophers problem.
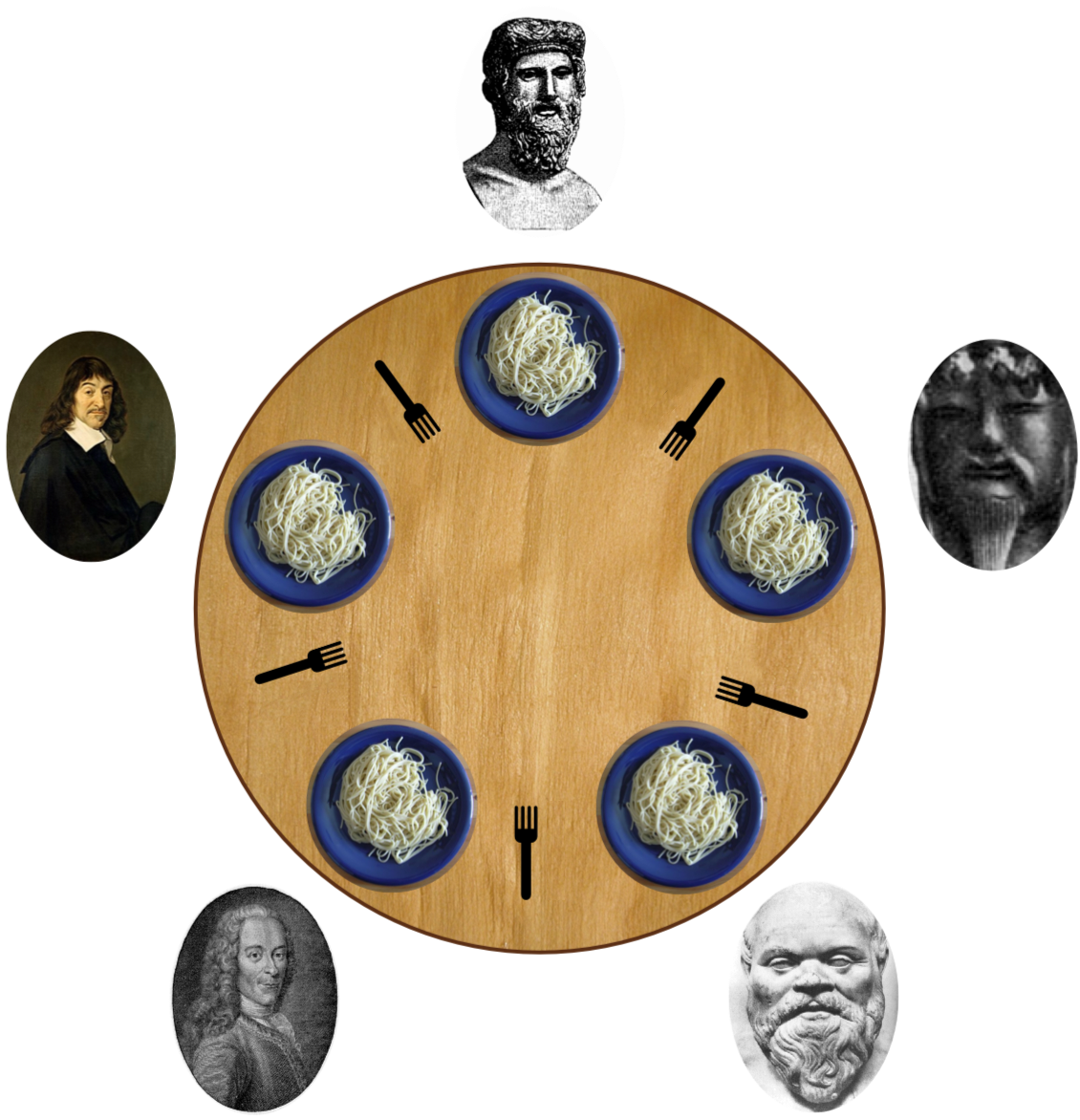
The problem supposes a certain number of philosophers, seated around a circular table, who spend their lives alternating between thinking and eating. There is a fork placed between each pair of neighbouring philosophers which both can access and a philosopher must be in possession of both forks in order to eat. A philosopher may only pick up one fork at a time and when a philosopher finishes eating, both forks are placed back on the table and he/she returns to thinking. Notice that, since the philosophers share forks, it is not possible for all to eat at the same time.
Below we represent graphically the case when there are five philosophers seated around the table.
A solution to this problem is an algorithm for each of the philosophers to follow that will ensure that:
For an example of a situation that can lead to deadlock, suppose that all philosophers become hungry at the same time and reach out and take their left fork, then if all reach for the right fork no one can move.
We now consider Lehmann and Rabin's randomised solution to this problem [LR81]. It ensures that the system is deadlock-free, i.e. that, if a philosopher is hungry, then eventually a philosopher eats.
The PRISM model in the case of three philosophers is given below.
// randomized dining philosophers [LR81] // three philosophers mdp // formulae // left fork free (left neighbour is philosopher 2) formula lfree = (p2>=0 & p2<=4) | p2=6 | p2=10; // right fork free (left neighbour is philosopher 3) formula rfree = (p3>=0 & p3<=3) | p3=5 | p3=7 | p3=11; module phil1 p1: [0..11]; [] p1=0 -> (p1'=1); // trying [] p1=1 -> 0.5 : (p1'=2) + 0.5 : (p1'=3); // draw randomly [] p1=2 & lfree -> (p1'=4); // pick up left [] p1=3 & rfree -> (p1'=5); // pick up right [] p1=4 & rfree -> (p1'=8); // pick up right (got left) [] p1=4 & !rfree -> (p1'=6); // right not free (got left) [] p1=5 & lfree -> (p1'=8); // pick up left (got right) [] p1=5 & !lfree -> (p1'=7); // left not free (got right) [] p1=6 -> (p1'=1); // put down left [] p1=7 -> (p1'=1); // put down right [] p1=8 -> (p1'=9); // move to eating (got forks) [] p1=9 -> (p1'=10); // finished eating and put down left [] p1=9 -> (p1'=11); // finished eating and put down right [] p1=10 -> (p1'=0); // put down right and return to think [] p1=11 -> (p1'=0); // put down left and return to think endmodule // construct further modules through renaming module phil2 = phil1 [ p1=p2, p2=p3, p3=p1 ] endmodule module phil3 = phil1 [ p1=p3, p2=p1, p3=p2 ] endmodule // labels // a philosopher is hungry label "hungry" = ((p1>0)&(p1<8))|((p2>0)&(p2<8))|((p3>0)&(p3<8)); // a philosopher is eating label "eat" = ((p1>=8)&(p1<=9))|((p2>=8)&(p2<=9))|((p3>=8)&(p3<=9)); // philosopher 1 is hungry label "hungry1" = (p1>0)&(p1<8); // philosopher 2 is hungry label "hungry2" = (p2>0)&(p2<8); // philosopher 3 is hungry label "hungry3" = (p3>0)&(p3<8); // philosopher 1 is eating label "eat1" = (p1>=8)&(p1<=9); // philosopher 2 is eating label "eat2" = (p2>=8)&(p2<=9); // philosopher 3 is eating label "eat3" = (p3>=8)&(p3<=9);
This model is a Markov decision process (MDP), as denoted by the keyword at the start of the file. We have three modules, representing the three philosophers.
Notice that, after a philosopher eats (e.g. when p1=9 for philosopher 1), the nondeterministic choice as to which fork he/she puts down first is represented by two commands being enabled (i.e. there are multiple commands with overlapping guard p1=9).
Notice also the use of the PRISM formulas (lfree and rfree) to represent expressions that are re-used several times in the file. In this model, these formulas are used to identify states of the left (or right) neighbour of a philosopher in which he/she is not using his/her fork. As a consequence, this requires the renaming of each of the variables p1, p2 and p3 when constructing the modules for philosophers 2 and 3. This renaming corresponds to the fact that the left and right neighbours of philosopher 2 and 3 differ from that of philosopher 1.
The basics steps of the algorithm for each philosopher are:
 Download the model file lr3.nm from above and load it into PRISM.
Download the model file lr3.nm from above and load it into PRISM.
Before starting you should modify one of the settings in PRISM: launch the "Options" dialog from the main menu
and set the "engine" to be "MTBDD" (this might already be the case if you saved your setting in a previous practical).
This is because not all the model checking algorithms used in the practical are currently supported by the other engines.
Use the PRISM simulator to generate some random paths through the model.
Notice how, for an MDP model like this, multiple probability distributions may be available in a state.
Generate a path by hand where one of the philosophers eats.
By using module renaming, write versions of the algorithm when there are 4 and 5 philosophers.
One thing to take into account is whether the neighbours of the philosophers change.
For each of the models, add labels corresponding to whether each individual philosopher is hungry/eating.
We will now use PRISM to analyse the above model.
Load the following properties file into PRISM:
// deadlock freeness filter(forall, "hungry" => P>=1 [ F "eat"]) // no resource starvation filter(forall, "hungry1" => P>=1 [ F "eat1"]) filter(forall, "hungry2" => P>=1 [ F "eat2"]) filter(forall, "hungry3" => P>=1 [ F "eat3"])
Verify the loaded properties to
check that the model is deadlock-free, but is not resource starvation-free.
Also verify your models for four and five philosophers against these specifications.
Read the section of the manual on
filters
as we will uses these in our specifications.
Construct properties to compute, from the (single) state where all philosophers are thinking,
both the minimum and maximum probability that a philosopher eats within k steps.
(Hint: look up the state filter in the manual page above.)
Plot results for the case of three, four and five philosophers.
Then construct reward structures and properties to find both the minimum and maximum expected time for a philosopher to eat from the state where all philosophers
are thinking. Verify these properties on the models of three and four philosophers. Describe a strategy that achieves the minimum expected time.
Lehmann and Rabin solved the resource-starvation problem by extending the above approach so that the philosophers are courteous. More precisely: a philosopher will not pick up his/her neighbour’s fork (when it has no forks) if that neighbour is trying to eat and has not eaten since the philosopher's most recent meal.
This is achieved by using shared variables between neighbouring philosophers and shown by the following pseudo-code.
var Ieft-signal, right-signal : {On,Off}; *** Ieft-signal is shared with left neighbour initially set to Off *** *** It is set to On when one becomes hungry and restored to Off only after eating. *** *** The left neighbour may read it but not change it and refers to it as right-neighbour-signal . *** *** The case is symmetric for the right-signal. *** read only var left-neighbour-signal ,right-neighbour-signal : {On,Off}; *** left-neighbour-signal is left neighbour’s right signal. *** var left-last,right-last : {Left,Neutral,Right}; *** left-last is shared with left neighbour and both may change it. *** *** It indicates who ate last : left from fork or right from fork *** *** Initially the value is Neutral (as no one has eaten) *** *** left-last is the same as left neighbour’s right-last. *** 1. trying:=true *** move from thinking to hungry *** 2. left-signal:=On; right-signal:=On 3. while trying do 4. ‘draw a random element s of {Right,Left}; *** with equal probabilities *** 5. wait until s fork is down and (s-neighbour-signal=Off or s-last=Neutral or s-last=s) 6. then lift fork s 7. if R(s) fork is down *** R(Right)= Left and R(left)=Right *** 8. then lift it and trying:=false 9. else put down fork s 10. od 11. eat; 12. left-signal:=Off; right-signal:=Off; 13. left-last:=Right; right-last:=Left; 14. put down both forks *** one at a time in any order *** |
We will now extend our PRISM code to specify Lehmann and Rabin's courteous dining philosophers.
First, save a new copy of the model lr3.nm as clr3.nm.
Next, we will add a number of constants, variables and formulas that will be needed in the specification.
Add constants for NEUTRAL,
LEFT and RIGHT which take the values 0, 1 and 2 respectively.
To represent the variables left-signal and right-signal,
add the variables left_signal1 and right_signal1
to philosopher 1 and add similar variables for philosophers 2 and 3 through renaming.
Define a suitable ranges and initial values for these variables given that left-signal and right-signal take two values (Off and On).
In the pseudo code there are two shared variables, left-last and right-last,
that we will represent in PRISM using global variables.
Read the sections on
global variables
in the manual.
Now add global variables fork1_last, fork2_last and fork3_last which
will be used to represent the variables left-last and right-last in
the pseudo code above.
Define suitable ranges and initial values for these variables given that these variables take the values NEUTRAL, LEFT and RIGHT
(and the constants we introduced above).
Draw a diagram
of the three philosophers (phil1, phil2 and phil3) and three forks (fork1, fork2 and fork3)
as this will help understand the relationships between the philosophers and the forks.
For example, this should make to easier to work out
which fork/philosopher is to the right/left of philosopher 1.
Write formulas for philosopher 1 being courteous when waiting
to pick up his/her left fork and when waiting to pick up his/her right fork.
Now rename the appropriate variables in the modules of philosopher 2 and 3 such that after
renaming these formulas they correctly model these philosophers being courteous.
Using the above constants, variables and formulas modify the commands of phil1 to match the pseudo
code for the courteous dining philosophers defined above. Note that you will probably have to extend the range of
p1 and you will also have to change the labels at the end of the file to match
your modifications. Notice since you have already changed the renaming to match the new variables
and formulas the modules phil2 and phil3 should
also now correctly model the courteous dining philosophers.
Check the protocol is resource starvation-free and deadlock-free.
From any state where all philosophers are hungry, find the minimum and maximum expected time for any philosopher to eat and,
for each philosopher, from any state where he/she is hungry, the minimum and maximum expected time for that philosopher to eat.
[ Back to index ]